На нашем интернет портале море информации по пищевой
и перерабатывающей промышленности, АПК и пищевой тематике
и перерабатывающей промышленности, АПК и пищевой тематике
Эффективная автоматизация современного производства основывается на внедрении механических манипуляторов, промышленных роботов, робототехнических систем и комплексов гибких автоматизированных производств.
Манипулятор с двумя поршневыми пневматическими приводами (модулями) линейных перемещений приведен на рис. 1. Корпус привода 2 закреплен на стойке 4 при помощи кронштейнов 6 и стяжных болтов 5. Привод 1 установлен на подвижных элементах привода 2 непосредственно или через переходные устройства, увеличивающие число относительных положений приводов. На корпусе привода 2 имеется блок 3 дросселей, служащих для настройки скоростей перемещений манипулятора. На подвижной выходной элемент малого привода 1 закрепляют захват или другой иной рабочий орган.
В зависимости от модификации манипулятора привод 2 выполняют на максимальный ход 100 или 150 мм. Ход приводов регулируется бесступенчато от нуля до максимального путем перемещения упоров подвижных частей. Приводы снабжены пневматическими регулируемыми демпферами.
Конструкции стойки и кронштейна позволяют разворачивать приводы манипулятора на любой угол горизонтальной плоскости и ступенчато через 90° в вертикальной, а также поднимать и опускать их по всей стойке.

Рис. 1. Манипулятор с двумя поршневыми пневматическими приводами
Манипулятор используют в составе сборочных автоматизированных
линий. Он не имеет автономной системы управления, работоспособен при любой
пространственной ориентации стойки.
Техническая характеристика манипулятора: масса переносимых объектов 0,3 кг; число координат
перемещения 2; точность по каждой координате 0,1 мм; линейные перемещения
50 и 150 мм;
продолжительность цикла 4 с; давление воздушной сети 0,4...0,6 МПа; габаритные
размеры 498 х 180 х 650 мм;
масса 10,2 кг.
Автоматический конвейерный манипулятор МАК-1-50 предназначен для разгрузки и загрузки подвесного грузонесущего конвейера без его остановки. Одновременно он подает перегружаемые изделия на транспортные средства, в контейнеры, на поддоны и др.
Манипулятор имеет тележку-основание, передвигающуюся вдоль конвейера по параллельным путям. На шарнире закреплена «рука» с захватом, являющимся частью манипулятора.
Главная особенность манипулятора — наличие гидрораспределителя, в функции которого входят посылка импульса для отсчета шагов, обеспечение различных режимов работы и удержание манипулятора в заданной точке.
Управление манипулятором, входящим в роботизированную транспортно-технологическую систему производства, выполненную на базе подвесного грузонесущего конвейера, осуществляется от управляющего вычислительного комплекса счетной машины.
Манипулятор работает следующим образом. Подвесной грузонесущий конвейер, предназначенный для транспортирования перегружаемых изделий, проходит через рабочую зону, протяженность которой вдоль трассы конвейера определяется путевыми металлоконструкциями для перемещения манипулятора. Гидравлическая система снабжается рабочей жидкостью под давлением от станции гидропривода, установленной неподвижно на путевых металлоконструкциях и связанной с манипулятором гибкими шлангами, уложенными в цепь одностороннего изгиба.
Манипулятор, а также транспортное и технологическое оборудование, с которым он взаимодействует, могут управляться от малой цифровой вычислительной машины. С помощью электрошкафа, электрически связанного с управляющей машиной и манипулятором, обеспечивается управление агрегатами гидравлической системы. Для управления в ручном режиме при проверке работоспособности механизмов и отработке элементов траектории в процессе подготовки программируемых перемещений имеется пульт ручного управления.
Техническая характеристика манипулятора МАК-1-50: грузоподъемность 50 кг; число независимых перемещений 4; наибольшее перемещение захвата поперек конвейера 0,5 м, вертикальное — 0,8, вдоль конвейера — до 70 м; поворот ручки 90°; радиус поворота ручки 700 мм; скорость поворота ручки 45 град/с; скорость грузонесущего конвейера 0,3 м/с; точность позиционирования ±3 мм; размеры перегружаемых изделий — диаметр 80... 120 мм, длина 260... 1000 мм; габаритные размеры 1400 х 1100 х 2050 мм; масса 750 кг.
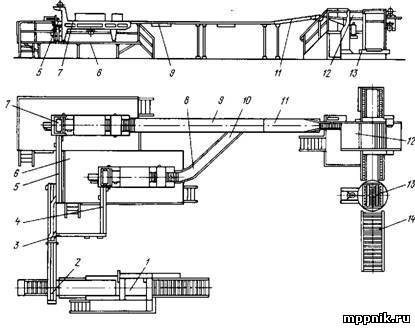
Робот РЦ5-Г10 (рис. 2) предназначен для обеспечения загрузки и разгрузки технологического оборудования, выполнения транспортно-складских, сборочных и других операций. Он состоит из основания 1, на котором расположена гидроаппаратура, а также приводов поворота и подъема, вертикальной стойки 2. Привод 3 поворота выполнен в виде двух гидроцилиндров, соединенных между собой штоком-рейкой, находящейся в зацеплении с реечным колесом, которое жестко соединено с вертикальной стойкой 2. Привод подъема также выполнен в виде гидроцилиндра, шток которого непосредственно соединен со стойкой, на которой закреплен привод горизонтального перемещения «руки» 4.
«Рука» приводится в движение от спаренных гидроцилиндров через зубчато-реечную передачу. К «руке» крепятся сменные модули кисти 5 и захватов 6 с пневматическим приводом.
Робот устанавливают на регулируемых опорах 7. Управление движениями «руки» осуществляется с помощью двухпозиционных P102-EJI514 и трехпозиционных P102-AЛ44 распределителей.
Техническая характеристика робота РЦ5-Г10: грузоподъемность 10 кг; горизонтальное перемещение «руки» 400 мм; подъем «руки» 200 мм; поворот «руки» 245°; скорость горизонтального перемещения 1,0 м/с, подъема «руки» 0,5 м/с, поворота «руки» 90 град/с; точность позиционирования 10,1 мм; система управления — цикловая с управлением по пути; габаритные размеры механической части робота 1220 х 730 х 460 мм; масса 300 кг.

Рис. 2. Робот РЦ5-Г10
Преимущество робота РЦ5-Г10 — наличие во всех приводах «руки» специальных механизмов позиционирования, которые позволяют осуществлять остановку «руки» в любом требуемом положении. Благодаря применению специальных тормозных устройств обеспечивается безударная остановка «руки».
Робот «Ромео», выпускаемый фирмой «Меллерс» (Германия), предназначен для укладки различных тарно-штучных грузов (ящиков, мешков) на плоские поддоны. Робот состоит из поворачивающейся колонки с пневматическими подъемными салазками, по которым рычаг грейфера передвигается по прямой с двойным или одинарным телескопированием. Форма грейфера соответствует захватываемому грузу. Робот имеет четыре оси перемещения. Схема укладки грузов на поддоне программируется, ее можно изменять вручную или автоматически.
Техническая характеристика робота: грузоподъемность 50 кг; плечо обслуживания 1900 мм; горизонтальный ход рычага грейфера 1400 мм, вертикальный — 2000 мм; угол поворота колонки грейфера 360°; скорость перемещения 2,5 м/с, подъема-опускания 1,25, телескопического перемещения 1,44 м/с, поворота 133 град/с.
Для работы в режиме комплектования заказа из ячеек стеллажей робот изготавливают с перемещением по пяти осям. К функциям его перемещения (поворачивание вокруг вертикальной оси, подъем и опускание рычага, движение рычага вперед-назад и поворачивание грейфера) добавляется передвижение по направляющим. Робот движется между рядами полок и отбирает необходимый груз.
Машина «Автопак» ШП200/А, выпускаемая промышленным кооперативом «Надькереш» (Венгрия), предназначена для скрепления пакета грузов на плоском поддоне растянутой пленкой. Пакет на поддоне может быть сформирован из мелкоштучных, тарно-штучных грузов различных типоразмеров.
Поворотный круг для установки пакета плоский, низко расположенный. Для установки и съема пакета вилочными погрузчиками или тележками поворотный круг оснащен металлическими пандусами.
Техническая характеристика машины: производительность 20...30 пакетов в час; размеры поддона 1200 х 800 х 145 мм; высота пакета до 2000 мм, масса до 1000 кг; мощность электродвигателей 1,5 кВт; расход сжатого воздуха 2 м3/ч; скрепляют пакет полиэтиленовой или поливинилхлоридной растянутой пленкой толщиной 15...40 мкм, шириной 400...500 мм; диаметр стола 1500 мм; габаритные размеры машины 2700 х 2500 х 2780 мм; масса 800...900 кг.
Гибкие системы складской переработки грузов (ГССГ) предназначены для внутрискладских перевозок и переработок грузов. ГССГ — это совокупность в разных сочетаниях гибких складских и производственных модулей, роботизированной транспортной сети склада, систем обеспечения их функционирования. Предназначены ГССГ для перевозки местным потребителям небольших партий различной продукции.
Гибкий складской модуль (ГСМ) — единица складского оборудования (кран-штабелер, пакетоформирующая машина и т. п.) с автономной микропроцессорной системой управления для упаковки, комплектации и других операций с продукцией.
Гибкий производственный модуль (ГПМ) — единица технологического оборудования ГССГ для фасования, раскроя тары и других операций в сфере обращения. ГПМ и ГСМ можно встраивать в ГССГ. Роботизированная внутрискладская транспортная сеть (РВТС) — составляющая ГССГ для перемещения грузов на складе.
ЭВМ и микропроцессорную технику широко используют на современном этапе автоматизации транспортно- складских операций. При этом преобладают не централизованные (как это было в 60-е и 70-е гг.), а многоуровневые распределенные системы управления с широкой сетью периферийных устройств (дисплейных, портативных, бортовых и т. п.).
Применение этих и других средств автоматизации управления позволяет в конечном итоге осуществить так называемую безбумажную технологию учета и комплектации на складе.
Важную роль в переходе к малолюдным и безлюдным технологиям складской грузопереработки играют транспортные роботы класса AGVS (Automatically Guided Vehicle System) или робокары. Для управления транспортными роботами применяют оптические, механические и индуктивные системы.
Системы управления, основанные на индуктивной связи с магнитным полем, создаваемым проложенным в небольшом углублении в полу по маршруту движения проводом, работают следующим образом. Маршрут движения транспортных роботов в индуктивно управляемых системах задается проволочным проводником, имеющим вид замкнутого контура. По проводнику, проложенному по маршруту движения в канавке с последующей заливкой, проходит переменный ток определенной частоты, получаемый от стационарного генератора. Вдоль проводника, задающего трассу движения транспортного робота, создается магнитное поле с концентричным расположением силовых линий. Поле пронизывается катушками индуктивности, размещенными на роботе. Системы автоматического вождения сравнивают напряженность магнитного поля двух приемных катушек. При появлении рассогласования вырабатывается сигнал, подаваемый на привод рулевого управления для изменения направления движения робота соответственно вправо или влево. Устройство рулевого управления роботом оборудовано переключаемыми приемными контурами индуктивной связи, настроенными на частоты генераторных токов.
Для остановки робота в заданных пунктах и определения его местонахождения служат ориентиры, расположенные вдоль трассы. В качестве ориентиров применяют электромагнитные и фотоэлектрические датчики, датчики характеристических частот, датчики на проводнике, задающем трассу движения.
Сравнение заданных значений с фактическими осуществляется бортовым электронным устройством робота, распознающим путь следования к адресату, а также выполняющим дополнительные функции управления погрузкой и разгрузкой.
На центральных диспетчерских станциях применяют табло со световой мнемосхемой, изображающей маршрутную схему в уменьшенном масштабе. На ней трассы движения роботов подразделены на отрезки в виде светящихся стрелок. При наличии устройства запоминания вызовов, поступающих с мест, табло с мнемосхемой может быть дополнено оборудованием для автоматического адресования и дистанционной передачи всей информации.